
Last week, the walking version of the Egg Robot was updated to include an outrigger brace to prevent bending of the legs inward as the robot leans. This unexpected bending inwards caused the upward leg to drag as it advances. No good. This week, I installed a new pair of braces to reduce this effect.
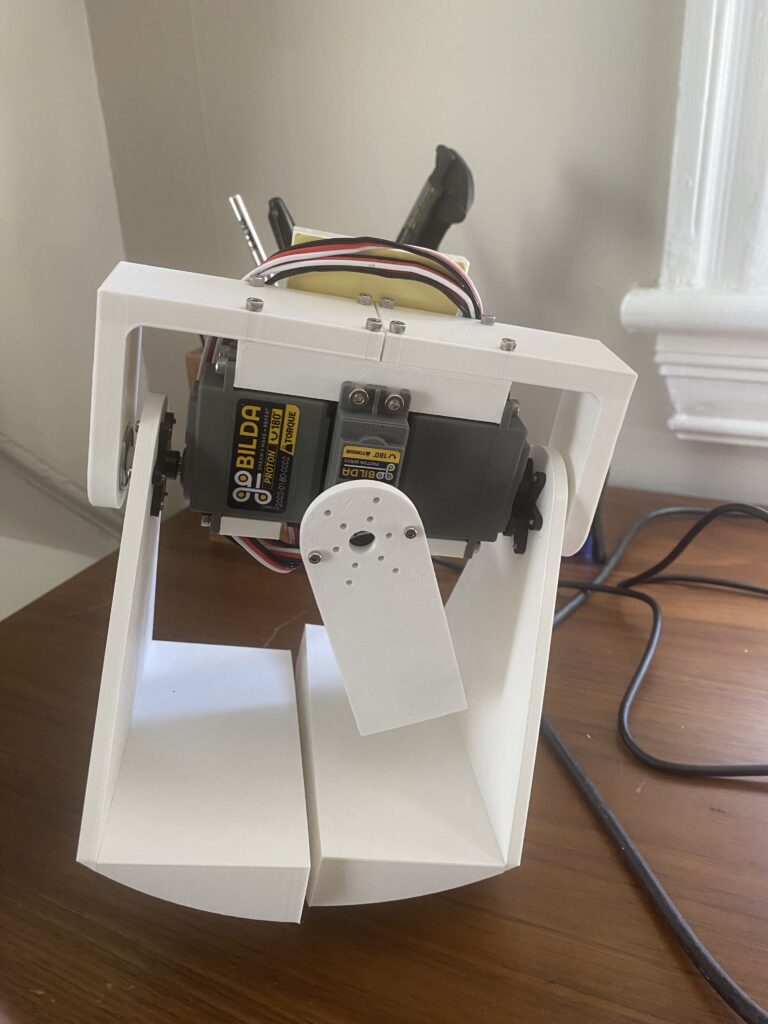
Did it work? Mostly. The outrigger braces attach to the main body and reach around to the outside of each leg. Bearings in each brace mate with axles built into each leg. The other end of the axle is supported by the servo horn. To my hand, the legs are much, much stiffer. It’s still not “perfect” and sags, which is to be expected from this basic cantilevers design. I could imagine making a two sided support with U-shaped legs supported from the middle. The robot would get much bigger, in that case.
What to do about the leg still dragging? The weight of the bearings reduces the effectiveness of the pendulum, reducing the lean angle, so the leg still drags. In order to reduce this effect, I will redesign the feet to spread the gap between the feet, add a chamfer to the feet to reduce the “elephants foot” printing artifact, and designing a non-spherical foot shape. Another approach would be to dynamically “pump” the swing and use the increased lean to raise the foot further.
Next Steps
- Add chamfer to foot
- Spread gap between feet
- Non-round foot to amplify lean at maximum pendulum angle